




Servopoziționare cu axă dublă tip C/L/U
Parametri tehnici
| Servopoziționare cu două axe de tip C | Servopoziționare cu două axe de tip L | Servopoziționare cu două axe de tip U | |||||||||||
| Număr de serie | PROIECTE | Parametru | Parametru | Parametru | OBSERVAȚII | Parametru | Parametru | Parametru | OBSERVAȚII | Parametru | Parametru | Parametru | OBSERVAȚII |
| 1 | Sarcină nominală | 200 kg |
500 kg | 1000 kg | În raza de R400 mm/R400 mm/R600 mm a celei de-a doua axe | 500 kg | 1000 kg | 2000 kg | În raza de R400 mm/R600 mm/R800 mm a celei de-a doua axe | 1000 kg | 3000 kg | 5000 kg | În raza de R600 mm/R1500 mm/R2000 mm a celei de-a doua axe |
| 2 | Raza standard de girație | R400mm | R400mm | R600mm |
| R400mm | R600mm | R800mm |
| R600mm | R1500mm | R2000mm |
|
| 3 | Unghiul de basculare al primei axe | ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
|
| 4 | Unghiul de rotație al celei de-a doua axe | ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
|
| 5 | Viteza nominală de rotație ascendentă a primei axe | 50°/S | 50°/S | 15°/S |
| 50°/S | 50°/S | 17°/S |
| 17°/S | 17°/S | 17°/S |
|
| 6 | Viteza nominală de rotație a celei de-a doua axe | 70°/S | 70°/S | 70°/S |
| 70°/S | 70°/S | 17°/S |
| 24°/S | 17°/S | 24°/S |
|
| 7 | Precizia poziționării repetate | ±0,10 mm | ±0,15 mm | ±0,20 mm |
| ±0,10 mm | ±0,10 mm | 17°/S |
| ±0,15 mm | ±0,20 mm | ±0,25 mm |
|
| 8 | Dimensiunea limită a cadrului de deplasare (lungime × lățime × înălțime) | 1200 mm × 600 mm × 70 mm | 1600 mm × 800 mm × 90 mm | 2000 mm × 1200 mm × 90 mm |
| - | - | - |
| - | - | - |
|
| 9 | Dimensiunea totală a schimbătorului de poziție (lungime × lățime × înălțime) | 2000 mm × 1100 mm × 1700 mm | 2300 mm × 1200 mm × 1900 mm | 2700 mm × 1500 mm × 2200 mm |
| 1500 mm × 500 mm × 850 mm | 2000 mm × 750 mm × 1200 mm | 2400 mm × 900 mm × 1600 mm |
| 4200 mm × 700 mm × 1800 mm | 5500 mm × 900 mm × 2200 mm | 6500 mm × 1200 mm × 2600 mm |
|
| 10 | Placă rotativă standard cu două axe | - | - | - | - | Φ800mm | Φ1200mm | Φ1500mm |
| Φ1500mm | Φ1800mm | Φ2000mm |
|
| 11 | Înălțimea centrală a primei axe de rotație
| 1200 mm | 1350 mm | 1600 mm |
| 550 mm | 800 mm | 1000 mm |
| 1500 mm | 1750 mm | 2200 mm |
|
| 12 | Condiții de alimentare cu energie electrică | Trifazat 200V±10%50HZ | Trifazat 200V±10%50HZ | Trifazat 200V±10%50HZ | Cu transformator de izolare | Trifazat 200V±10%50HZ | Trifazat 200V±10%50HZ | Trifazat 200V±10%50HZ | Cu transformator de izolare | Trifazat 200V±10%50HZ | Trifazat 200V±10%50HZ | Trifazat 200V±10%50HZ | Cu transformator de izolare |
| 13 | Clasa de izolație | H | H | H |
| H | H | H |
| H | H | H |
|
| 14 | Greutatea netă a echipamentului | Aproximativ 800 kg | Aproximativ 1300 kg | Aproximativ 2000 kg |
| Aproximativ 900 kg | Aproximativ 1600 kg | Aproximativ 2500 kg |
| Aproximativ 2200 kg | Aproximativ 4000 kg | Aproximativ 6000 kg | |
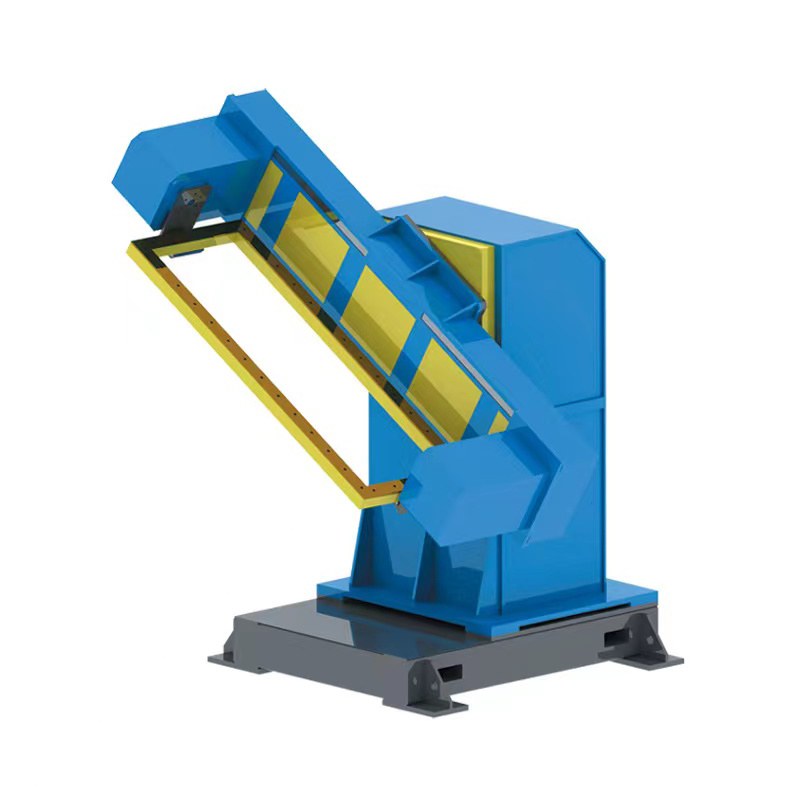
Servopoziționare cu două axe de tip C
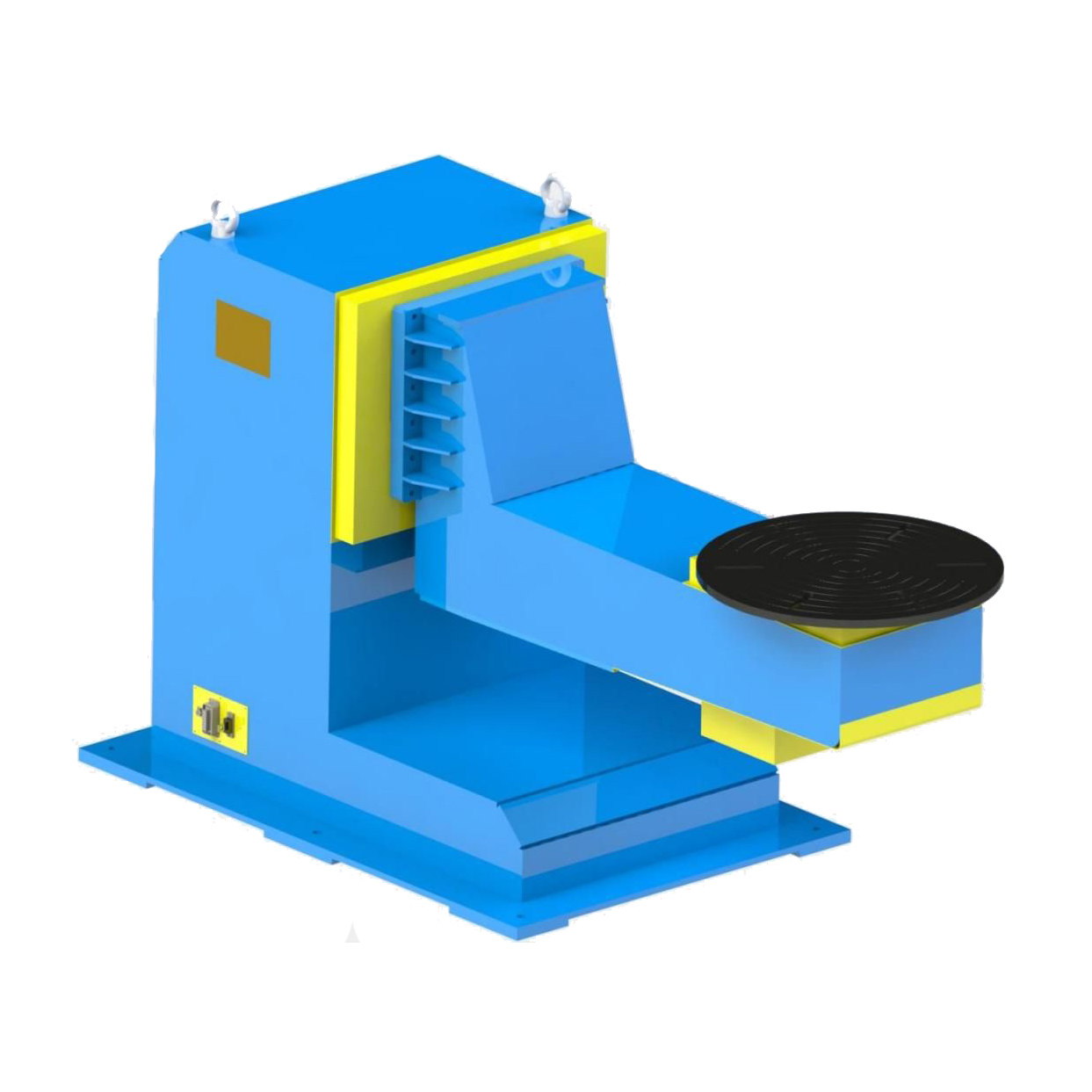
Servopoziționare cu două axe de tip L

Servopoziționare cu două axe de tip U
Introducere în structură
Servopoziționarea cu două axe este compusă în principal dintr-un cadru integral sudat, un cadru de deplasare sudat, un servomotor de curent alternativ și un reductor de precizie RV, un suport rotativ, un mecanism conductiv, un ecran protector și un sistem de control electric. Cadrul integral sudat este realizat cu profile de înaltă calitate. După recoacere și detensionare, acesta este prelucrat prin prelucrare profesională pentru a asigura o precizie ridicată a prelucrării și acuratețea pozițiilor cheie. Suprafața este pulverizată cu vopsea antirugină, care este frumoasă și generoasă, iar culoarea poate fi personalizată în funcție de cerințele clientului.
Cadrul de deplasare sudat va fi sudat și turnat din oțel profilat de înaltă calitate și prelucrat prin prelucrare mecanică profesională. Suprafața va fi prelucrată cu găuri standard pentru șuruburi pentru montarea sculelor de poziționare, iar tratamentul de vopsire, înnegrire și prevenire a ruginii va fi efectuat.
Platforma rotativă selectează oțel profilat de înaltă calitate după prelucrare mecanică profesională, iar suprafața este prelucrată cu găuri standard pentru șuruburi pentru montarea sculelor de poziționare, fiind efectuat un tratament de înnegrire și prevenire a ruginii.
Selectarea servomotorului de curent alternativ și a reductorului RV ca mecanism de alimentare poate asigura stabilitatea rotației, precizia poziționării, durabilitatea îndelungată și rata scăzută de defecțiune. Mecanismul conductiv este fabricat din alamă, care are un efect conductiv bun. Baza conductivă adoptă izolație integrală, care poate proteja eficient servomotorul, robotul și sursa de alimentare pentru sudură.
Sistemul de control electric adoptă un PLC japonez Omron pentru a controla poziționerul, cu performanțe stabile și rată scăzută de defecțiuni. Componentele electrice sunt selectate de la mărci renumite din țară și din străinătate pentru a asigura calitatea și stabilitatea utilizării.











